I’ve now uploaded the binary Java Archive (JAR) for the EV3 control software, as well as the Force.com software in AppExchange packaged form. These coupled with the required hardware and installation of LeJOS, is all you need to control your EV3 creations from Salesforce. You don’t need to be a developer, but quite competent with installing tools and following technical instructions. I’ve written up some instructions as follows, enjoy!
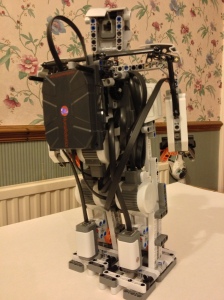
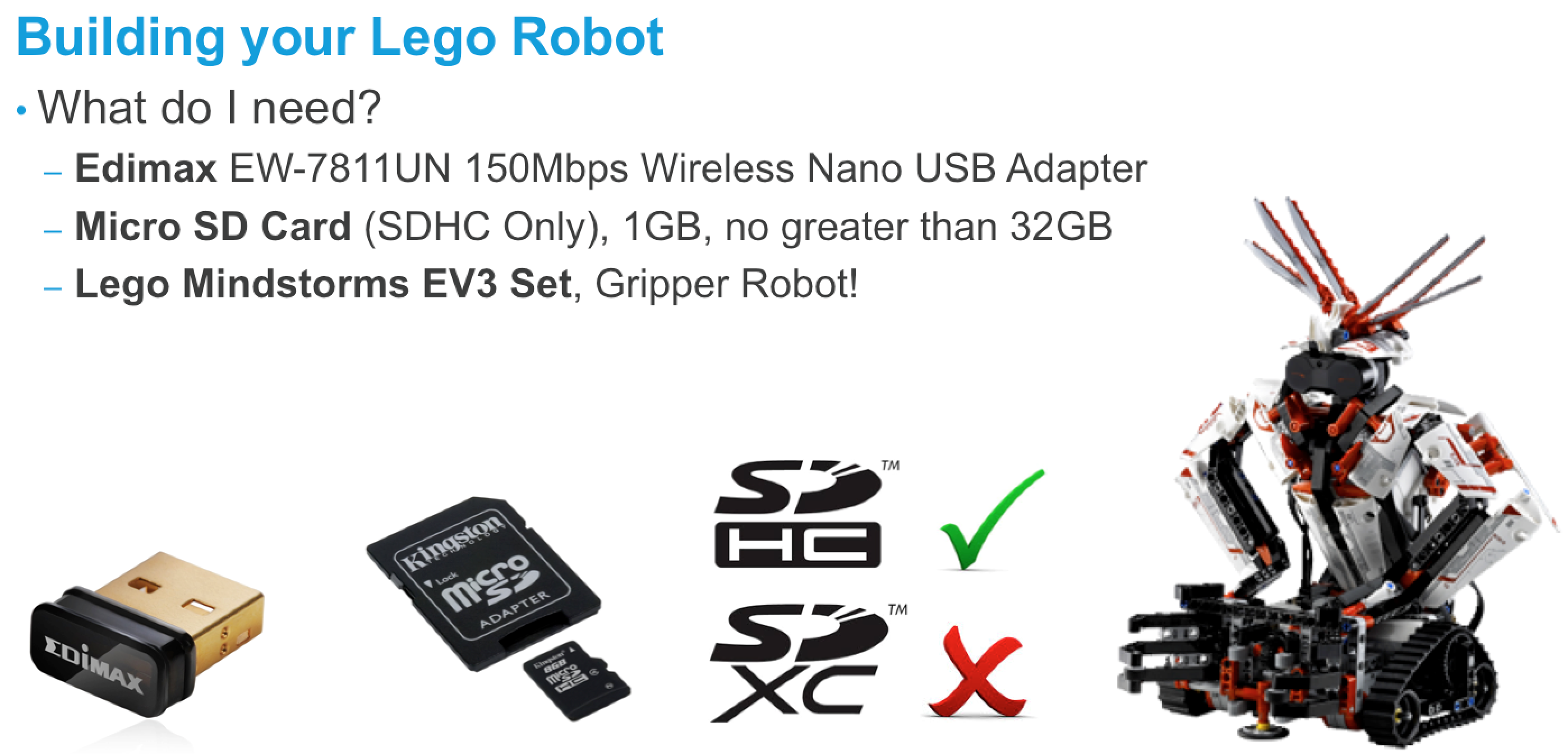
- Setup your EV3 as described here, confirm LeJOS is installed and you can see the menu. It must also be connected properly to your Wifi. This can be a challenge sometimes, but there is an excellent LeJOS forum here!
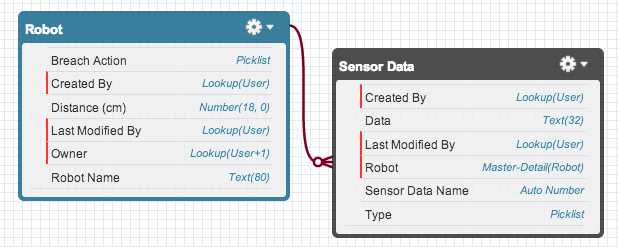
- Install the Machine Cloud package, this provides the Robot, Command and Program objects used to control the robot and connect it to Salesforce, using the Pairing process, more on this later. You can learn more about these objects and how to use them in my session video. The package install link is here, after installing…
- Got to Setup and under Connected Apps, edit the EV3Force Pairing app
- Select ‘Admin approved users are pre-authorised‘ and press Save
- Add your profile to the list of permitted profiles, by scrolling down and selecting Manage Profiles
- Got to the Robots tab and create a new record, name does not matter, after saving the record you should see a prompt to enter a Pin number (if you don’t check step 2 sub-steps). Leave this for now open.
- Download the ev3force.jar file from here and copy to the EV3 robot using the EV3Control tool, as described here (if you have a problem running the EV3 tools on your Mac/PC check the LeJOS forum).
- Run the ev3force.jar program on the EV3 using the LeJOS menu on the device, after a while you should see a Pin number on the screen. Go back to the Robot record you created in step 3 and enter the Pin number. Your device will then be paired with the org.
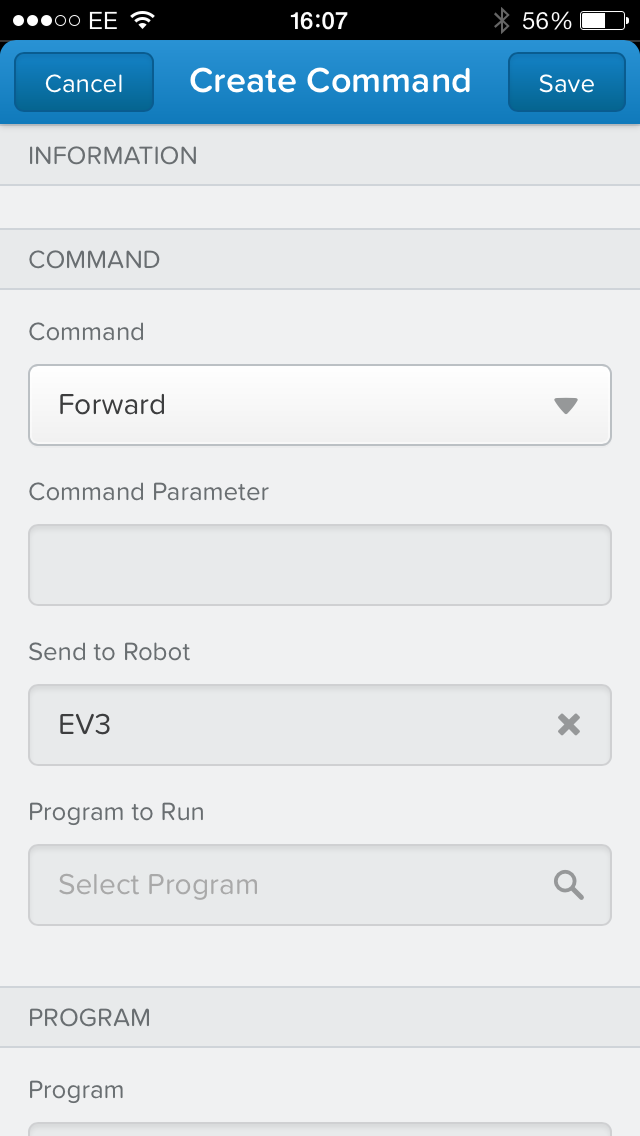
- Go ahead and create a Command record, to switch on the robots LED for example, more examples are in my video.
Refer to my Dreamforce 2015 slide deck for further screenshots and instructions and also my video. Finally please feel free to ask questions here or preferably i can offer help via the GitHub Issues page here.
IMPORTANT NOTE: I will also in due course upload the source code for both Java and Apex code, in the meantime, here is a quick Gist of the EV3 Java code. Note also that their is a pairing aspect to this, currently hosted on Heroku, this can be shared by all robots using the code above. Though please use only developer or test/play orgs with this service.

 The Lego MachineCloud project has received a massive boost in the form of two great technologies from Lego and Salesforce! I’m so pleased to confirm that my test to get the
The Lego MachineCloud project has received a massive boost in the form of two great technologies from Lego and Salesforce! I’m so pleased to confirm that my test to get the 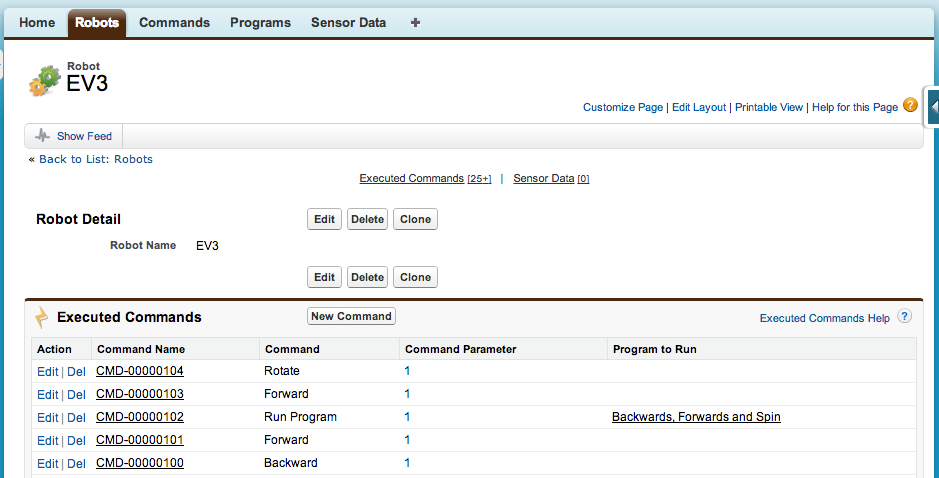








![photo[1]](https://brickinthecloud.com/wp-content/uploads/2013/03/photo1.png)